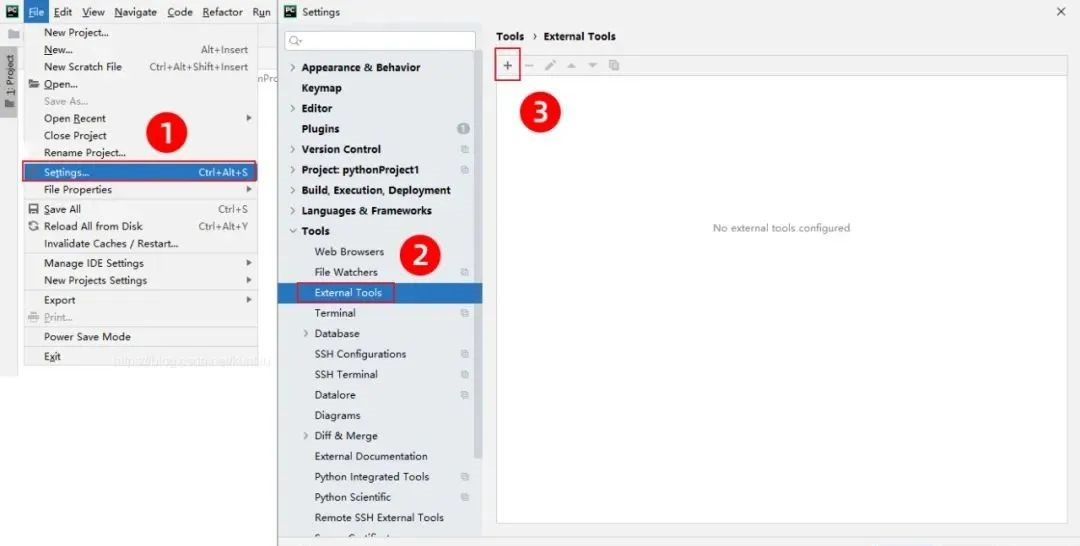
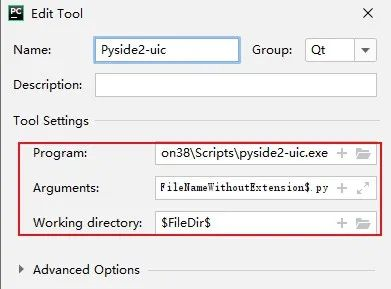
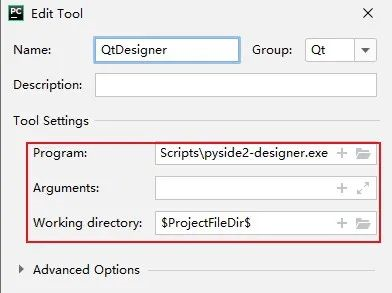
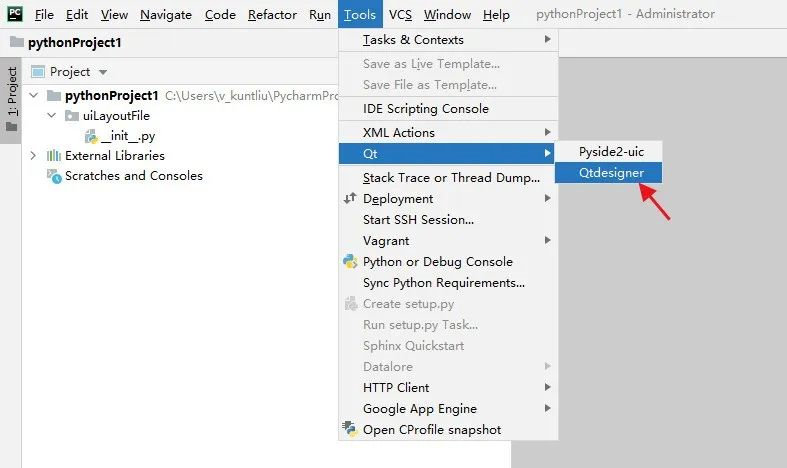
a. routine interface

b. convert image in CAD to motion control codes of ".bas" through "ZmotionCadV1.0" tool.
--open this tool, click "file" -- "import", then select and open CAD graphic in dxf form that is to be converted--

--after opening, like this--

--click "file" -- "export" to export ".bas" file, then it can do above trajectory motion control when it is downloaded into control card--
--please refer to former corresponding article for CAD usage--
c. program example
--load UI file of QT in Python--
from PySide2.QtWidgets import QMessageBox
from PySide2.QtCore import QFile, QTimer
from PySide2.QtUiTools import QUiLoader
q_state_file = QFile("mainweiget.ui")
q_state_file.open(QFile.ReadOnly)
self.ui = QUiLoader().load(q_state_file)
q_state_file.close()
note: at this time, self.ui means ui in qt.
--in event processing function of link button, call controller connection interface function "ZAux_OpenEth()" to connect to controller, then open timer 1 to watch controller status after linked--

--watch controller state through timer--

--select corresponding bas file through event processing function of "select bas file" button--

--download and open selected bas file through event processing function of "opening" button--

note: ".bas" file also can be downloaded through our ZDevelop programming software. ZAux_BasDown command will generate one single bas file as ZAR and download it into controller.
--stop, pause and resume controller through event processing function of "stop", "pause", "resume" buttons--

Compile and run
the routine, at the same time, connect to controller through ZDevelop to watch controller states.
And filename of ".bas" file inside the controller can be viewed when opening "debug" mode in ZDevelop during connection.

Also, there is oscilloscope function in ZDevelop, it can capture waveform of continuous small segments. Below shows waveforms captured by oscilloscope and CAD respectively.


IMAGE 25
VIDEO DESCRIPTION